Moment of Inertia is a property of a body in rotational motion that resists changes in its rotational state. It is analogous to mass (inertia) in linear motion. Mathematically, it is defined as the sum of the product of each particle’s mass and the square of its distance from the axis of rotation: I = Σ mᵢrᵢ²and. It is measured in kg·m². Here, we will explore the concept of moment of Inertia in detail.
Moment of Inertia Formula,
The moment of inertia is a scalar quantity. Mathematically, it is defined as the product of the mass of a particle and the square of its distance from the axis of rotation. For a system of particles, the total moment of inertia is the sum of these products for all particles. The dimensional formula of the moment of inertia is [ML²].
The general formula for finding the Moment of Inertia of any object is,
I = mr2
where,
m is the mass of the object'
r is the distance from the axis of rotation
For a body consisting of continuous infinitesimally small particles, the Integral form of the Moment of Inertia is used to calculate the Moment of Inertia.
I = ∫dI
I =
\int_{0}^{M} r^2 dm
Also Read, Inertia
Moment of Inertia of Particle System
Moment of Inertia of a system of particles is given by the formula,
I = ∑mi ri2
where,
ri is the perpendicular distance of the ith particle from the axis
mi is the mass of ith particle
The above Moment of Inertia equation tells that moment of inertia for a system of particles is equal to the sum of product of the mass of each and the square of the distance from the rotation axis of each particle.
For the figure given below,
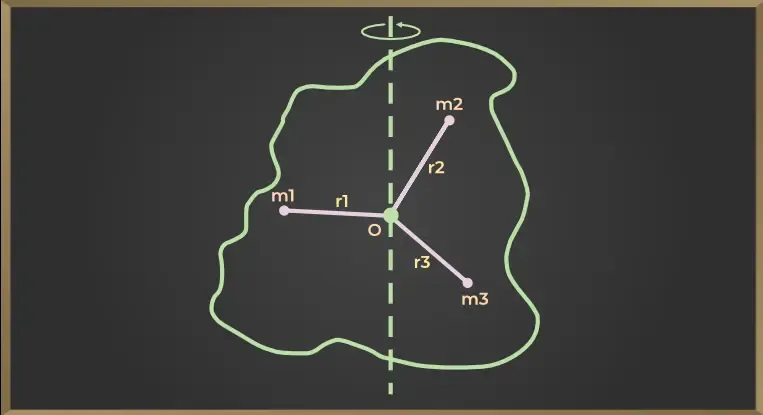
Moment of inertia of first particle = m1×r12
Moment of inertia of second particle = m2×r22
Moment of inertia of third particle = m3×r32
Similarly,
Moment of inertia of nth particle = mn×rn2
Now the moment of inertia of the entire body about the axis of rotation AB will be equal to the sum of the moment of inertia of all the particles, so
I = m1×r12 + m2×r22 + m3×r32 +......+mn×rn2
I = Σ mi×ri2
where,
I represent moment of inertia of the body about the axis of rotation
mi is the mass of ith particle,
ri is the radius of ith particle
Σ represents the sum.
From the equation, we can say that the moment of inertia of a body about a fixed axis is equal to the sum of the product of the mass of each particle of that body and the square of its perpendicular distance from the fixed axis.
How to Calculate Moment Of Inertia?
Several ways are used to calculate the moment of inertia of any rotating object.
- For uniform objects, the moment of inertia is calculated by taking the product of its mass with the square of its distance from the axis of rotation (r2).
- For non-uniform objects, we calculate the moment of inertia by taking the sum of the product of individual point masses at each different radius for this the formula used is,
I = ∑miri2
Moment Of Inertia Formula for Different Shapes
Here, Below is The Moment of Inertia for some symmetric objects along with their rotation axis:
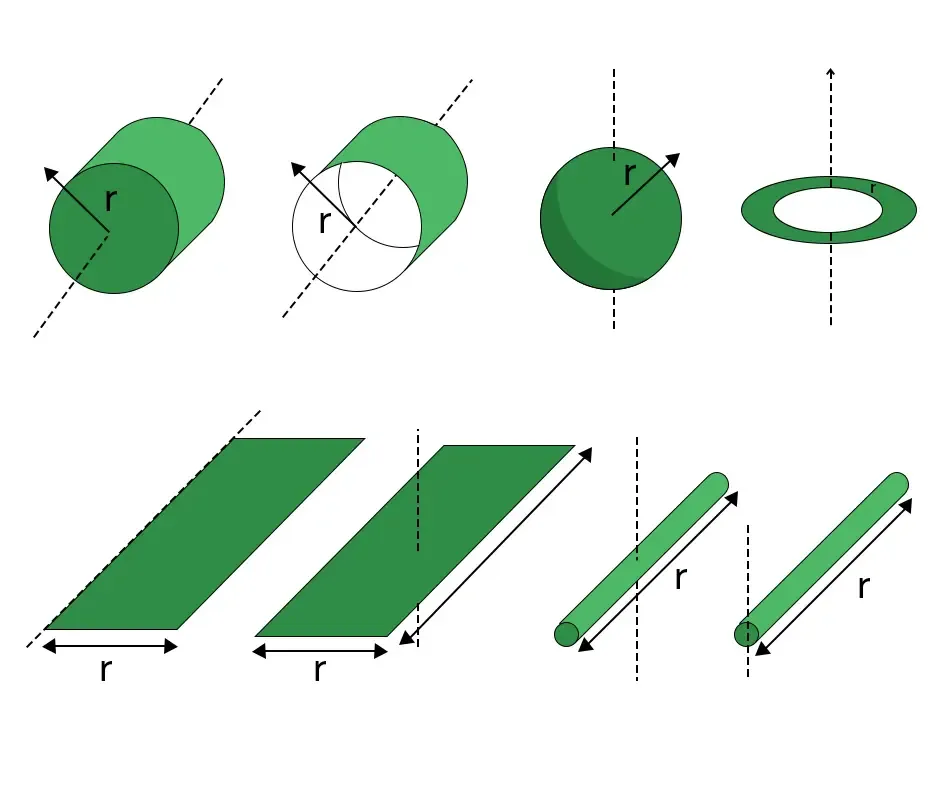
This table discusses expressions for the moment of inertia for some symmetric objects along with their rotation axis:
| Object | Axis | Expression of the Moment of Inertia |
|---|---|---|
| Hollow Cylinder Thin-walled | Central axis | I = Mr2 |
| Thin Ring | Diameter ( perpendicular axis) | I = 1/2 Mr2 |
| Annular Ring or Hollow Cylinder | Central axis | I = 1/2 M(r12 + r22) |
| Solid Cylinder | Central axis | I = 1/2 Mr2 |
| Uniform Disc | Diameter (perpendicular axis) | I = 1/4 Mr2 |
| Hollow Sphere | Central (perpendicular to plane) | I = 2/3 Mr2 |
| Solid Sphere | Central axis | I = 2/5 Mr2 |
| Spherical Shell (thick, uniform) | Central axis | |
| Rectangular Parallel piped (a × b)2 | Central | I = 1/12 M(a2 + b2) |
| Thin rod | Central | I = 1/12 Ml2 |
| Thin rod | At the End of Rod | I = 1/3 Ml2 |
Here , below is the derivations and formulas for the moment of inertia of common shapes—like plates, cylinders, spheres, rings, and triangles—based on their mass distribution and axis orientation, using symmetry and integration to show resistance to rotational motion.
Moment of Inertia of a Rectangular Plate
If the mass of the plate is M, length l, and width b, then the moment of inertia passes through the center of gravity and about an axis perpendicular to the plane of the plate.
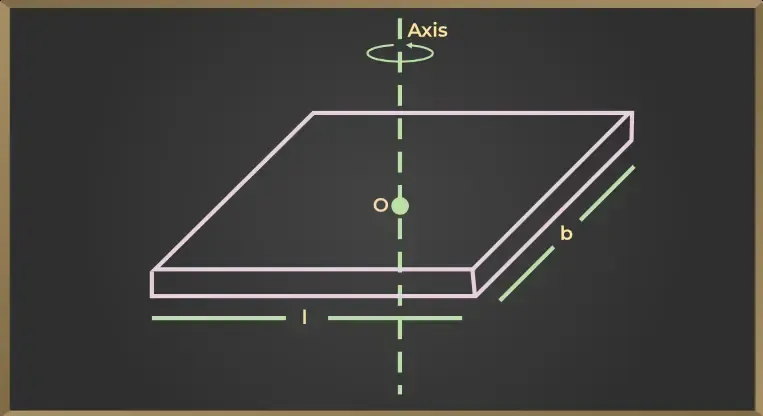
Divide the rectangle into small elements of area dA and mass dm. Let us choose a Cartesian coordinate system with origin O at the center of the rectangle.
I = \iint_A (x^2 + y^2) \, dm
\sigma = \frac{M}{l \cdot b}
dm = \sigma \, dx \, dy
I = \sigma \iint_{-l/2}^{l/2} \int_{-b/2}^{b/2} (x^2 + y^2) \, dy \, dx Integrate:
I = \sigma \left[ \int_{-l/2}^{l/2} x^2 \left( \int_{-b/2}^{b/2} dy \right) dx + \int_{-l/2}^{l/2} \left( \int_{-b/2}^{b/2} y^2 \, dy \right) dx \right] Similarly,
\int_{-b/2}^{b/2} dy = b, \quad\int_{-b/2}^{b/2} y^2 \, dy = \frac{b^3}{12}, \quad\int_{-l/2}^{l/2} x^2 \, dx = \frac{l^3}{12} Now plug in :
I = \sigma \left( b \cdot \frac{l^3}{12} + l \cdot \frac{b^3}{12} \right)= \sigma \cdot \frac{1}{12} (b l^3 + l b^3)= \sigma \cdot \frac{lb}{12} (l^2 + b^2)
\sigma = \frac{M}{lb} \quad \Rightarrow \quad I = \frac{M}{lb} \cdot \frac{lb}{12} (l^2 + b^2)
\boxed{I = \frac{1}{12} M (l^2 + b^2)}
Moment of Inertia of Hollow Cylinder
A hollow cylinder has two radii namely internal radius and external radius. The Moment of Inertia of a Hollow Cylinder having mass M, external radius R1, and internal radius R2 is given as,
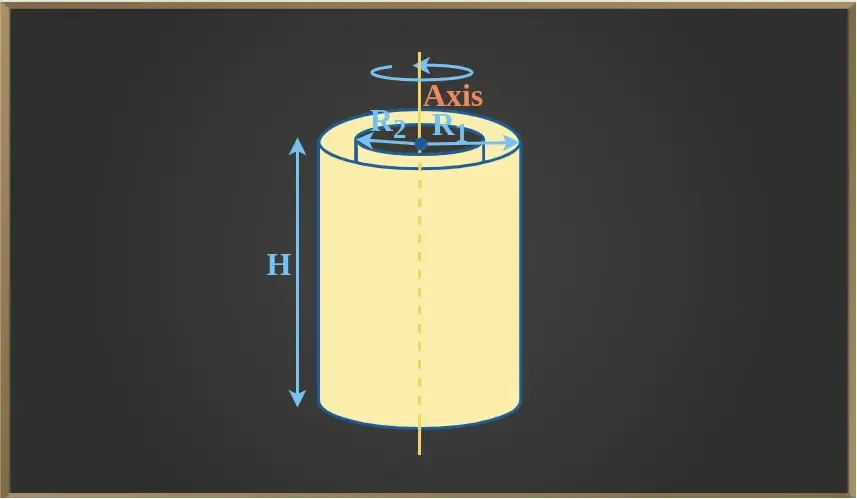
The cross-sectional area of the annular region is:
A = \pi (R_1^2 - R_2^2)
\sigma = \frac{M}{\pi (R_1^2 - R_2^2)} Consider a thin ring of radius ( r ) and thickness ( dr ).
Area of the ring:
dA = 2\pi r \, dr Mass of ring:
dm = \sigma \cdot dA = \sigma \cdot 2\pi r \, dr
dI = r^2 \, dm = r^2 \cdot \sigma \cdot 2\pi r \, dr = 2\pi \sigma r^3 \, dr
I = \int_{R_2}^{R_1} dI = \int_{R_2}^{R_1} 2\pi \sigma r^3 \, dr
I = 2\pi \sigma \int_{R_2}^{R_1} r^3 \, dr = 2\pi \sigma \left[ \frac{r^4}{4} \right]_{R_2}^{R_1}= \frac{2\pi \sigma}{4} (R_1^4 - R_2^4) = \frac{\pi \sigma}{2} (R_1^4 - R_2^4)
\sigma = \frac{M}{\pi (R_1^2 - R_2^2)}
I = \frac{\pi}{2} \cdot \frac{M}{\pi (R_1^2 - R_2^2)} \cdot (R_1^4 - R_2^4)= \frac{M}{2} \cdot \frac{R_1^4 - R_2^4}{R_1^2 - R_2^2}
{I = \frac{1}{2} M (R_1^2 + R_2^2)}
Moment of Inertia of Solid Sphere
The Moment of Inertia of a Solid Sphere of Mass 'M' and Radius 'R' is given as,
Consider a thin disk at a distance \( z \) from the center of the sphere, with thickness \( dz \).
At height \( z \), the radius of the disk is:
r = \sqrt{R^2 - z^2} Volume of the disk:
dV = \pi r^2 \, dz = \pi (R^2 - z^2) \, dz Assuming uniform density:
dV = \pi r^2 \, dz = \pi (R^2 - z^2) \, dz Assuming uniform density:
\rho = \frac{M}{\frac{4}{3} \pi R^3} Mass of the disk:
dm = \rho \cdot dV = \rho \pi (R^2 - z^2) \, dz The moment of inertia of a thin disk about its central axis is:
dI = \frac{1}{2} dm \cdot r^2 = \frac{1}{2} \cdot \rho \pi (R^2 - z^2)^2 \, dz Due to symmetry:
I = \rho \pi \int_{0}^{R} (R^2 - z^2)^2 \, dz
(R^2 - z^2)^2 = R^4 - 2R^2 z^2 + z^4 Integrate:
I = \rho \pi \int_0^R (R^4 - 2R^2 z^2 + z^4) \, dz= \rho \pi \left[ R^4 z - \frac{2}{3} R^2 z^3 + \frac{1}{5} z^5 \right]_0^R
\rho \pi \left( R^5 - \frac{2}{3} R^5 + \frac{1}{5} R^5 \right)= \rho \pi R^5 \left( 1 - \frac{2}{3} + \frac{1}{5} \right)= \rho \pi R^5 \cdot \frac{8}{15} Substitute Density
rho = \frac{3M}{4\pi R^3} I=
\frac{3M}{4\pi R^3} \cdot \pi R^5 \cdot \frac{8}{15}= \frac{3M R^2}{4} \cdot \frac{8}{15}= \frac{24}{60} M R^2 = \frac{2}{5} M R^2
\boxed{I = \frac{2}{5} M R^2}
Moment of Inertia of Hollow Sphere
The Moment of Inertia of a Hollow Sphere of Mass M and Radius 'R' is given as,
The total surface area of a sphere is:
A = 4\pi R^2 Surface mass density:
\sigma = \frac{M}{4\pi R^2} {Step 2: Consider a Thin Ring}
Divide the spherical surface into thin horizontal rings at polar angle
\theta, each of width\theta Radius of the ring: r = R
Item Circumference:
2\pi R \sin\theta Area of the ring:
dA = 2\pi R \sin\theta \cdot R d\theta = 2\pi R^2 \sin\theta \, d\theta Mass of the ring:
dm = \sigma \cdot dA = \sigma \cdot 2\pi R^2 \sin\theta \, d\theta Moment of Inertia of the Ring:
dI = dm \cdot r^2 = \left( \sigma \cdot 2\pi R^2 \sin\theta \, d\theta \right) \cdot (R^2 \sin^2\theta)= 2\pi \sigma R^4 \sin^3\theta \, d\theta Total Moment of Inertia
I = \int_0^\pi dI = 2\pi \sigma R^4 \int_0^\pi \sin^3\theta \, d\theta Using the standard integral:
\int_0^\pi \sin^3\theta \, d\theta = \frac{4}{3}
I = 2\pi \sigma R^4 \cdot \frac{4}{3} = \frac{8\pi}{3} \sigma R^4 Step 5: Substitute
\sigma
sigma = \frac{M}{4\pi R^2}\Rightarrow I = \frac{8\pi}{3} \cdot \frac{M}{4\pi R^2} \cdot R^4= \frac{8M R^2}{12}= \frac{2}{3} M R^2
{I = \frac{2}{3} M R^2}
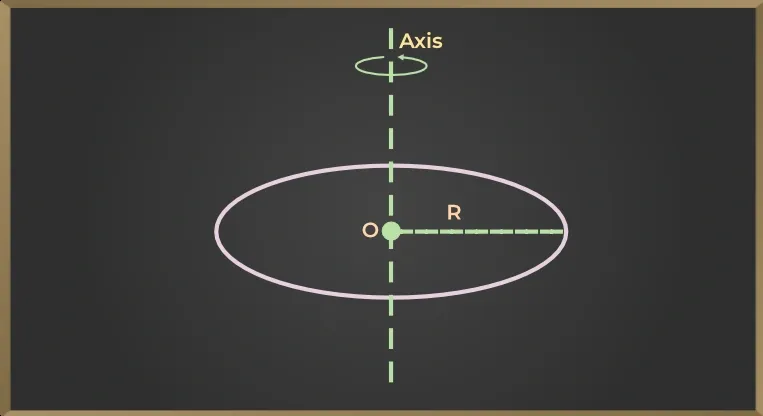
Moment of Inertia of Ring
The Moment of Inertia of a Ring is given for two cases when the axis of rotation passes through center and when the axis of rotation passes through the diameter.
The Moment of Inertia of the Ring of Mass M and Radius R about the axis passing through the center is given as,
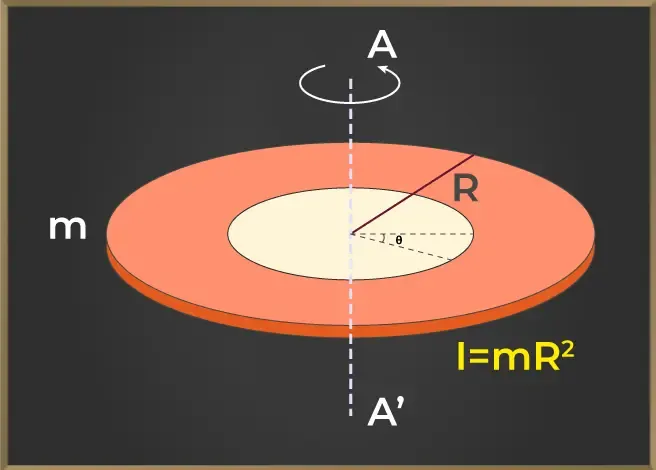
The moment of inertia of this element is:
dI = R^2 \cdot dm {Step 2: Integrate over the entire ring}
Since all elements are equidistant from the axis, we factor out
R^2
I = \int dI = \int R^2 \cdot dm = R^2 \int dm = R^2 \cdot M
\boxed{I = M R^2}
The Moment of Inertia of Mass M and of radius R of Ring about the axis passing through the diameter is given by:
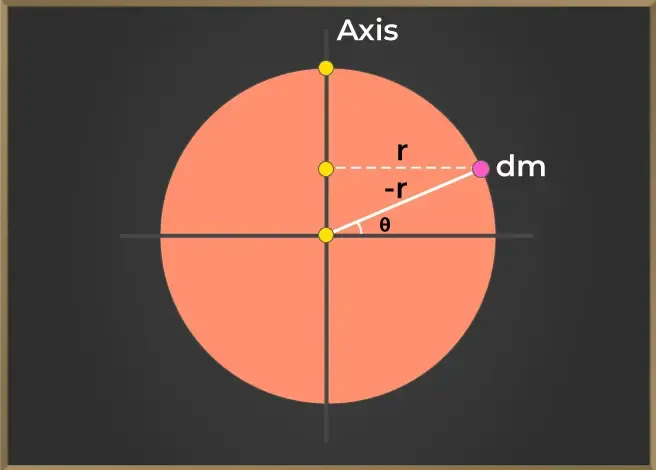
{Step 1: Known Moment of Inertia About Perpendicular Axis}
For a thin ring about an axis perpendicular to its plane and passing through its center (z-axis):
I_z = M R^2 {Step 2: Apply Perpendicular Axis Theorem}
For a planar object:
I_z = I_x + I_y For a symmetric ring:
I_x = I_y\Rightarrow I_z = 2 I_x \Rightarrow I_x = \frac{I_z}{2} Substitute the known value:
I_x = \frac{1}{2} M R^2
\boxed{I = \frac{1}{2} M R^2}
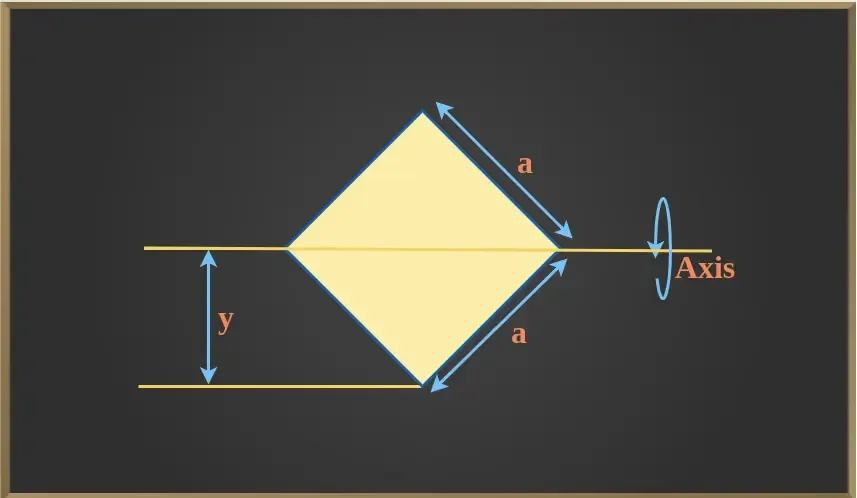
Moment of Inertia of Square
The Moment of Inertia of the Square of side 'a' of Mass M and axis of rotation is perpendicular to the plane (z-axis), passing through the center is given as:
{Step 1: Coordinate Setup}
Place the square in the xy-plane, centered at the origin.
Each side extends from
-\frac{a}{2} to\frac{a}{2} along both the x and y axis.Step 2: Surface Mass Density
Total area of the square:
A = a^2 Mass per unit area (surface density):
\sigma = \frac{M}{a^2} The moment of inertia about the z-axis is:
I_z = \iint (x^2 + y^2) \, dm
dm = \sigma \, dx \, dy , we get:
I_z = \sigma \int_{-a/2}^{a/2} \int_{-a/2}^{a/2} (x^2 + y^2) \, dy \, dx Split the integrals:
I_z = \sigma \left( \int_{-a/2}^{a/2} x^2 \left( \int_{-a/2}^{a/2} dy \right) dx+ \int_{-a/2}^{a/2} \left( \int_{-a/2}^{a/2} y^2 \, dy \right) dx \right) Evaluate each part:
\int_{-a/2}^{a/2} dy = a, \quad\int_{-a/2}^{a/2} y^2 \, dy = \frac{a^3}{12}, \quad\int_{-a/2}^{a/2} x^2 \, dx = \frac{a^3}{12} Now substitute:
I_z = \sigma \left( a \cdot \frac{a^3}{12} + a \cdot \frac{a^3}{12} \right)= \sigma \cdot \frac{a^4}{6} {Step 5: Substitute Surface Density}
\sigma = \frac{M}{a^2}\Rightarrow I_z = \frac{M}{a^2} \cdot \frac{a^4}{6} = \frac{1}{6} M a^2
{I = \frac{1}{6} M a^2}
The Moment of Inertia of a Square Plate of the Side 'a' Length 'l' and Mass M and axis of rotation is perpendicular to the plane (z-axis), through the center of the plate. is given as:
{Step 1: Coordinate Setup}
Place the square in the xy-plane with its center at the origin. Then, the plate extends from
Each side extends from -\frac{a}{2} to \frac{a}{2} along both the x and y axis. {Step 2: Surface Mass Density}
The area of the square is:
A = l^2 Surface mass density (mass per unit area):
\sigma = \frac{M}{l^2} {Step 3: Moment of Inertia Formula}
The moment of inertia about the z-axis is:
I = \iint (x^2 + y^2) \, Since,
dm = \sigma \, dx \, dy we substitute:
I = \sigma \int_{-l/2}^{l/2} \int_{-l/2}^{l/2} (x^2 + y^2) \, dx \, dy {Step 4: Evaluate the Integral}
I = \sigma \left( \int_{-l/2}^{l/2} x^2 \, dx \int_{-l/2}^{l/2} dy + \int_{-l/2}^{l/2} dx \int_{-l/2}^{l/2} y^2 \, dy \right) Now evaluate:
\int_{-l/2}^{l/2} x^2 \, dx = \frac{l^3}{12}, \quad \int_{-l/2}^{l/2} dy = l
\int_{-l/2}^{l/2} y^2 \, dy = \frac{l^3}{12}, \quad \int_{-l/2}^{l/2} dx = l So,
I = \sigma \left( \frac{l^3}{12} \cdot l + l \cdot \frac{l^3}{12} \right)= \sigma \cdot \frac{l^4}{6}
Step 5: Substitute \sigma
\sigma = \frac{M}{l^2}
\Rightarrow I = \frac{M}{l^2} \cdot \frac{l^4}{6} = \frac{1}{6} M l^2
\boxed{I = \frac{1}{6} M l^2}
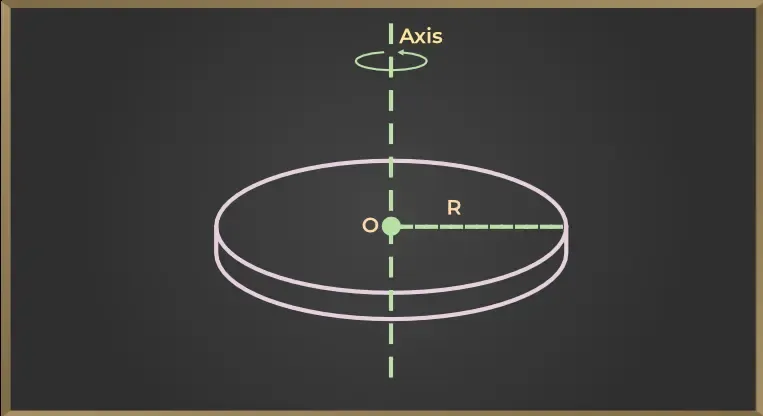
Moment of Inertia of a Disc
If the disc has a mass M and radius r, then the moment of inertia about the disc's geometric axis is:
The area of the disc is:
A = \pi r^2 Surface mass density (mass per unit area) is:
\sigma = \frac{M}{\pi r^2} {Step 2: Consider a Thin Ring Element}
\sigma = \frac{M}{\pi r^2} {Step 2: Consider a Thin Ring Element}
Take a thin ring at a distance ( x ) from the center, with thickness ( dx ).
Area of the ring:
dA = 2\pi x \, dx Mass of the ring:
( dm = \sigma \cdot dA = \sigma \cdot 2\pi x \, dx Moment of inertia of the ring about the center:
dI = x^2 \cdot dm = x^2 \cdot (2\pi \sigma x \, dx) = 2\pi \sigma x^3 \, dx {Step 3: Integrate Over the Entire Disc}
I = \int_0^r dI = 2\pi \sigma \int_0^r x^3 \, dx= 2\pi \sigma \cdot \left[ \frac{x^4}{4} \right]_0^r= 2\pi \sigma \cdot \frac{r^4}{4} = \frac{1}{2} \pi \sigma r^4 {Step 4: Substitute Surface Density}
I = \frac{1}{2} \pi \cdot \frac{M}{\pi r^2} \cdot r^4 = \frac{1}{2} M r^2
\boxed{I = \frac{1}{2} M r^2}
Moment of Inertia of a Rod
If the mass of the rod is M and the length is l, then the moment of inertia about the axis perpendicular to the length of the rod and passing through its center of gravity.
- Place the center of the rod at the origin on the x-axis.
- The rod spans from x=−l/2 to x= l/2
- The axis of rotation is perpendicular to the rod at x=0(center).
{Step 1: Coordinate Setup}
Place the rod along the x-axis with its center at the origin.
So the rod extends from x=−l/2 to x= l/2
{Step 2: Linear Mass Density}
\lambda = \frac{M}{l} A small element of length ( dx ) has mass:
dm = \lambda \, dx {Step 3: Moment of Inertia Formula}
I = \int_{-l/2}^{l/2} x^2 \, dm = \lambda \int_{-l/2}^{l/2} x^2 \, dx {Step 4: Evaluate the Integral}
int_{-l/2}^{l/2} x^2 \, dx = \left[ \frac{x^3}{3} \right]_{-l/2}^{l/2}
= \frac{1}{3} \left( \left( \frac{l}{2} \right)^3 - \left( -\frac{l}{2} \right)^3 \right)
= \frac{2}{3} \cdot \frac{l^3}{8} = \frac{l^3}{12} So,
I = \lambda \cdot \frac{l^3}{12} = \frac{M}{l} \cdot \frac{l^3}{12} = \frac{1}{12} M l^2
{I = \frac{1}{12} M l^2}
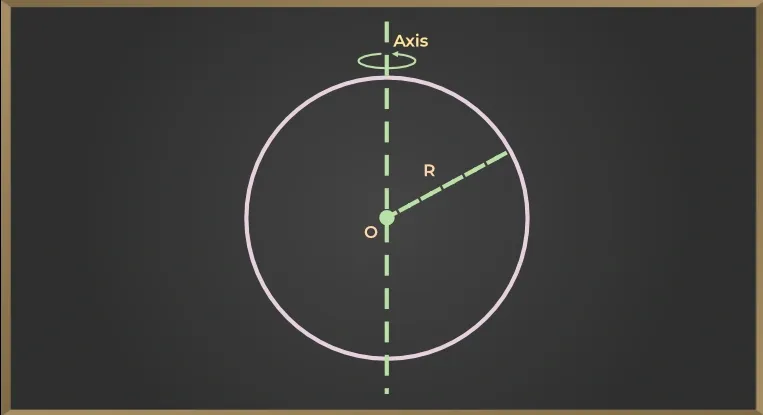
Moment of Inertia of a Circle
If the mass of the ring is M and the radius of the ring is r, then the moment of inertia about the axis passing through perpendicularly to the center of the ring is:
{Step 1: Geometry and Assumption}
All the mass elements in a thin circular ring lie at the same distance ( r ) from the center.
For any small element of mass
dm , the moment of inertia about the center is:
dI = r^2 \, dm {Step 2: Integrate Over the Entire Ring}
Integrate
dI over the entire mass( M) of the ring:
I = \int dI = \int r^2 \, dm = r^2 \int dm = r^2 \cdot M
\boxed{I = M r^2}
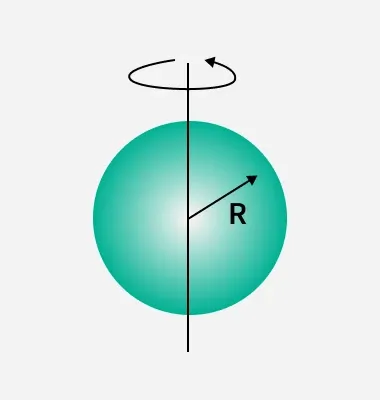
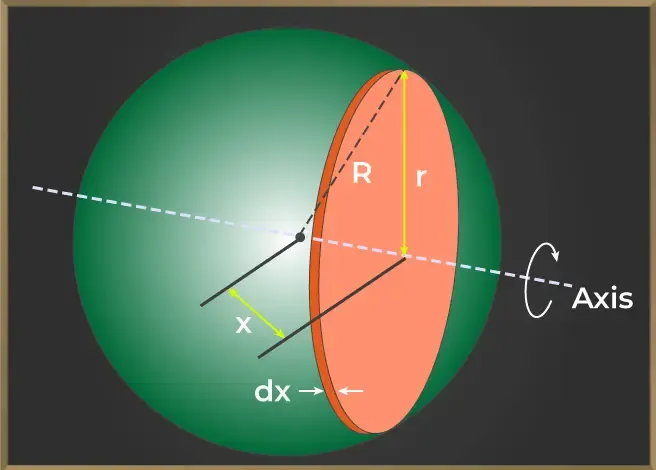
Moment of Inertia of a Sphere
If a Solid Sphere has a mass of M and a radius of r, then the moment of inertia about its diameter is :
- Let the sphere be centered at the origin.
- The axis of rotation is the z-axis (along the diameter).
- Consider a thin disc of thickness dz at height z, perpendicular to the z-axis.
Mass of the sphere: (M)
Radius of the sphere: ( r )
Axis of rotation: Diameter (central axis)
We slice the sphere into thin discs of thickness ( dz ), perpendicular to the z-axis.
At a height ( z ), the radius of the disc is:
R(z) = \sqrt{r^2 - z^2} {Step 2: Volume and Mass of a Thin Disc}
Volume of the disc:
( dV = \pi R^2 \, dz = \pi (r^2 - z^2) \, dz Total volume of the sphere:
V = \frac{4}{3} \pi r^3 Mass density:
\rho = \frac{M}{\frac{4}{3} \pi r^3} Mass of the disc :
dm = \rho \cdot dV = \rho \pi (r^2 - z^2) \, dz {Step 3: Moment of Inertia of a Disc}
Each disc has moment of inertia about its center:
dI = \frac{1}{2} R^2 \cdot dm = \frac{1}{2} (r^2 - z^2) \cdot \rho \pi (r^2 - z^2) \, dz = \frac{1}{2} \pi \rho (r^2 - z^2)^2 \, dz {Step 4: Integrate Over the Sphere}
I = \int_{-r}^{r} dI = \frac{1}{2} \pi \rho \int_{-r}^{r} (r^2 - z^2)^2 \, dz Expand the integrand:
(r^2 - z^2)^2 = r^4 - 2r^2 z^2 + z^4 So:
I = \frac{1}{2} \pi \rho \int_{-r}^{r} \left( r^4 - 2r^2 z^2 + z^4 \right) \, dz Now integrate each term:
\int_{-r}^{r} r^4 \, dz = 2r^5, \quad \int_{-r}^{r} z^2 \, dz = \frac{2r^3}{3}, \quad \int_{-r}^{r} Substitute:
I = \frac{1}{2} \pi \rho \left( 2r^5 - 2r^2 \cdot \frac{2r^3}{3} + \frac{2r^5}{5} \right)= \frac{1}{2} \pi \rho r^5 \left( 2 - \frac{4}{3} + \frac{2}{5} \right)
{I = \frac{2}{5} M r^2}
Moment of Inertia of Solid Cylinder
The Moment of Inertia of a Solid Cylinder of Radius 'R' and mass M is given by :
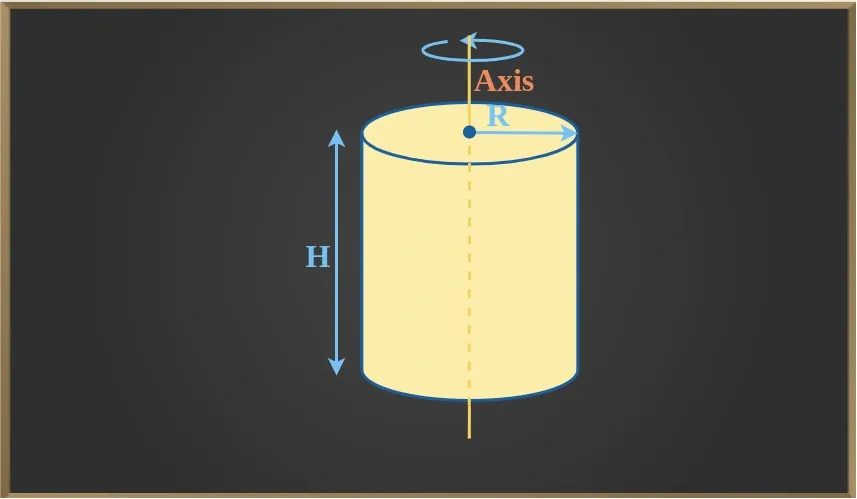
{Step 1: Volume and Mass Density}
The total volume of the cylinder is:
V = \pi R^2 h The mass density is:
\rho = \frac{M}{\pi R^2 h} {Step 2: Consider a Thin Disc}
The volume of one disc is:
dV = \pi R^2 \, dz The mass of one disc is:
dm = \rho \cdot dV = \rho \pi R^2 \, dz {Step 3: Moment of Inertia of the Disc}
The moment of inertia of a thin disc about its center is:
I = \int_0^h dI = \int_0^h \frac{1}{2} \pi \rho R^4 \, dz = \frac{1}{2} \pi \rho R^4 \int_0^h dz = Substitute,
( \rho = \frac{M}{\pi R^2 h}
I = \frac{1}{2} \pi \cdot \frac{M}{\pi R^2 h} \cdot R^4 h = \frac{1}{2} M R^2
{I = \frac{1}{2} M R^2}
Moment of Inertia of Triangle
The Moment of Inertia of a Triangle is given for 3 situations, first, when axis pass through the centre, second when axis pass through the base and third when axis is perpendicular to the base.
Let's see the formula for them one by one. For a triangle of base 'b' and height 'h', the formula for moment of inertia is given as follows:
I = \frac{1}{36} b h^3 {Step 1: Geometry Setup}
Place the triangle with:
Base (b) on the x-axis, from x=0 to x=b
Height (h) along the y-axis, from
y = 0 to y=hThe width of the triangle at a height (y) is:
{Width at height } y = b\left(1 - \frac{y}{h}\right) Step 2: Area of a Horizontal Strip}
Thickness of strip: ( dy )
Width at height :
y ( b(1 - \frac{y}{h}) {Step 2: Area of a Horizontal Strip}
Thickness of strip:
( dy ) Width at height (y) :
( b(1 - \frac{y}{h}) Area:
( dA = b\left(1 - \frac{y}{h}\right) dy {Step 3: Moment of Inertia of Strip About Base}
dI_{\text{base}} = y^2 \cdot dA = y^2 \cdot b\left(1 - \frac{y}{h}\right) dy
I_{\text{base}} = \int_0^h y^2 \cdot b\left(1 - \frac{y}{h}\right) dy = b \int_0^h \left( y^2 - \frac{y^3}{h} \right) dy
= b \left[ \frac{y^3}{3} - \frac{y^4}{4h} \right]_0^h = b \left( \frac{h^3}{3} - \frac{h^3}{4} \right) = b \cdot \frac{h^3}{12} {Step 4: Use Parallel Axis Theorem to Find Moment About Centroid}
Centroid is located at distance
\frac{h}{3} from the base.
I_{\text{centroid}} = I_{\text{base}} - A d^2 = \frac{1}{12} b h^3 - \left( \frac{1}{2} b h \cdot \left( \frac{h}{3} \right)^2 \right)= \frac{1}{12} b h^3 - \frac{1}{2} b h \cdot \frac{h^2}{9}
= \frac{1}{12} b h^3 - \frac{1}{18} b h^3 = \left( \frac{3 - 2}{36} \right) b h^3 = \frac{1}{36} b h^3
{I = \frac{1}{36} b h^3}
When axis pass through the Base:
- Place triangle with base b along the x-axis, from x=0
- Height h goes up along the y-axis, from y=0 (base) to y=h (apex)
- Axis of rotation: Along the base (horizontal axis at the bottom of the triangle)
I = \frac{1}{12} b h^3 Place the triangle such that:
Base lies along the x-axis, from x=0 to x=b
Height extends from y=0 to y=h
At any height ( y ), the width of the triangle is:
\text{Width}(y) = b\left(1 - \frac{y}{h}\right) {Step 2: Area of a Horizontal Strip}
Thickness: dy
Width at height : ( y ) :
b\left(1 - \frac{y}{h}\right) Area:
dA = b\left(1 - \frac{y}{h}\right) dy {Step 3: Moment of Inertia of the Strip About the Base}
dI = y^2 \cdot dA = y^2 \cdot b\left(1 - \frac{y}{h}\right) dy {Step 4: Integrate Over the Height of the Triangle}
I = \int_0^h y^2 \cdot b\left(1 - \frac{y}{h} \right) dy = b \int_0^h \left( y^2 - \frac{y^3}{h} \right) dy
b \left[ \frac{y^3}{3} - \frac{y^4}{4h} \right]_0^h = b \left( \frac{h^3}{3} - \frac{h^4}{4h} \right) = b \left( \frac{h^3}{3} - \frac{h^3}{4} \right)
\int_0^h y^2 \, dy = \frac{h^3}{3}, \quad \int_0^h y^3 \, dy = \frac{h^4}{4} So:
I = b \left( \frac{h^3}{3} - \frac{h^4}{4h} \right) = b \left( \frac{h^3}{3} - \frac{h^3}{4} \right)
= b \cdot \frac{h^3}{12}
{I = \frac{1}{12} b h^3}
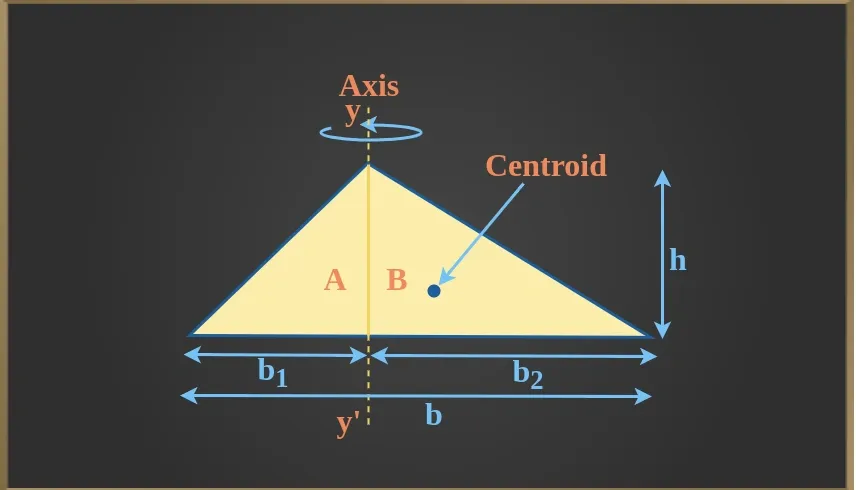
When axis is Perpendicular to the base:
- Base b
- Height h
- The right angle at the origin (0,0)
- Base along the x-axis from x=0 to x=bx
- Height going upward in the y-direction.
The equation of the hypotenuse is:
y = \frac{h}{b}x A vertical strip at a distance ( x ) from the y-axis has height:
y(x) = \frac{h}{b}x and differential area:
dA = y(x) \cdot dx = \left( \frac{h}{b}x \right) dx Moment of inertia of the strip:
dI_y = x^2 \cdot dA = x^2 \cdot \left( \frac{h}{b}x \right) dx = \frac{h}{b}x^3 dx Integrate over the base from
0 tob
I_y = \int_0^b \frac{h}{b}x^3 dx = \frac{h}{b} \int_0^b x^3 dx = \frac{h}{b} \cdot \left[ \frac{x^4}{4} \right]_0^b = \frac{h}{b} \cdot \frac{b^4}{4} = \frac{h b^3}{4} Moment of Inertia Through Centroid (Using Parallel Axis Theorem)}
The area of the triangle is:
A = \frac{1}{2} b h Distance from base to centroid is:
d = \frac{h}{3} Using the parallel axis theorem:
I_{\text{centroid}} = I_{\text{base}} - A d^2 = \frac{h b^3}{4} - \frac{1}{2} b h \cdot \left( \frac{h}{3} \right)^2= \frac{h b^3}{4} - \frac{1}{2} b h \cdot \frac{h^2}{9}= \frac{h b^3}{4} - \frac{b h^3}{18} After simplification, the moment of inertia about the vertical axis through the centroid (perpendicular to base) is:
{I = \frac{1}{36} b h^3} Alternatively, if the axis is horizontal (along the base or parallel to it), and you need the moment of inertia about the centroidal horizontal axis:
{I = \frac{1}{36} b^3 h}
Factors Affecting Moment of Inertia
Moment of Inertia of any object depends on the following values:
- Shape and size of the object
- Density of the material of the object
- Axis of Rotation
Radius of Gyration
The Radius of Gyration of a body is defined as the perpendicular distance from the axis of rotation to the point of mass whose mass is equal to the mass of the whole body and the Moment of Inertia is equal to the actual moment of inertia of the object as it has been assumed that total mass of the body is concentrated there. It is an imaginary distance. The Radius of Gyration is denoted by K.
If the mass and radius of gyration of the body are M and K respectively, then the moment of inertia of a body is
I = MK2 ......(1)
Thus, the Radius of Gyration of a body is perpendicular to the axis of rotation whose square multiplied by the mass of that body gives the moment of inertia of that body about that axis.
Again by equation (1),
K2 = I/M
Therefore,
K = √(I/m)
Thus, the Radius of the Gyration of a body about an axis is equal to the square root of the ratio of the body about that axis.
Theorems of Moment of Inertia
There are two types of theorems that are very important with respect to the Moment of Inertia:
- Parallel Axis Theorem
- Perpendicular Axis Theorem
1. Perpendicular Axis Theorem
Perpendicular Axis Theorem states that the sum of the moment of inertia of a body about two mutually perpendicular axes situated in the plane of a body is equal to the moment of inertia of the body about the third axis which is perpendicular to the two axes and passes through their point of intersection.
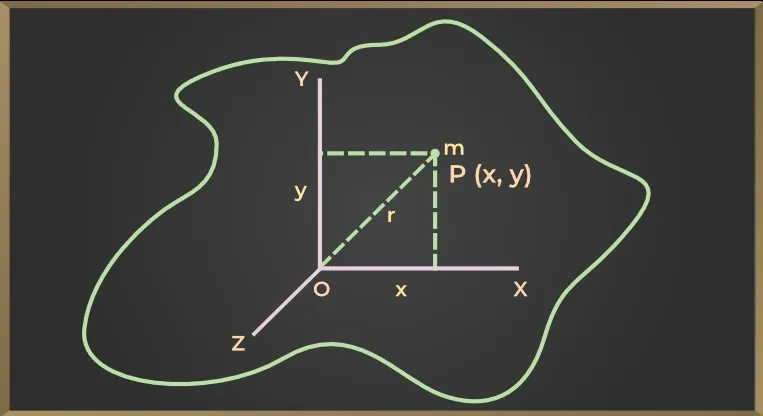
In the above figure, OX and OY are two axes in the plane of the body which are perpendicular to each other. The third axis is OZ which is perpendicular to the plane of the body and passes through the point of intersection of the OX and OY axes. If Ix, Iy, and Iz are the moments of inertia of the body about the axis OX, OY, and OZ axes respectively, then according to this theorem,
Ix + Iy = Iz
2. Parallel Axis Theorem
According to Parallel Axis theorem, the moment of inertia of a body about a given axis is the sum of the moment of inertia about an axis passing through the center of mass of that body and the product of the square of the mass of the body and the perpendicular distance between the two axes.
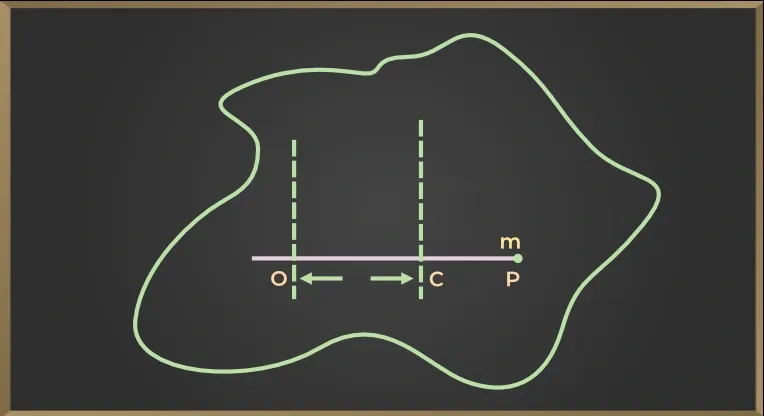
Let in the above figure, we have to find the moment of inertia of IO of the body passing through the point O and about the axis perpendicular to the plane, while the moment of inertia of the body passing through the center of mass C and about an axis parallel to the given axis is IC, then according to this theorem,
IO = IC + Ml2
where
M is the mass of the entire body
l is the perpendicular distance between two axes.
Difference Between Moment of Inertia and Inertia
The difference between inertia and moment of inertia is tabulated below:
| S.No. | Inertia | Moment of Inertia |
|---|---|---|
| 1. | Its importance is in linear motion. | Its importance is in rotational motion. |
| 2. | It is that property of an object which opposes the change of state of the object in linear motion. | The moment of inertia is that property of an object which opposes the change of state of the object in rotational motion. |
| 3. | The inertia of an object depends only on its mass. | The moment of inertia of an object depends on its mass and its mass distribution relative to the axis of rotation. |
| 4. | The inertia of an object is fixed. | The moment of inertia of an object varies with respect to different axes of rotation. |
Kinetic Energy of Rotating Body
Let us assume a body of Mass 'm' rotating with velocity v at a distance 'r' from the axis of rotation. Its angular velocity is then given by ω = v/r then v = rω. Now we know that the Kinetic Energy of a body is given by
KE = 1/2mv2
⇒ KE = 1/2m(rω)2
⇒ KE = 1/2mr2ω2
⇒ KE = 1/2Iω2
Hence, the Kinetic Energy of a Rotating Body is given by half of the product of the Moment of Inertia and the angular velocity of the body. The kinetic energy of rotating body is also called Rotational Kinetic Energy. The formula of Rotational Kinetic Energy is given as
KE = 1/2Iω2
The Moment of Inertia(I) is independent of the angular velocity of the body. It is a function of the mass of the rotating body and the distance of the body from the axis of rotation.
Hence, we observe that angular motion is analogous to linear motion, this means that the significance of Moment of Inertia is that it gives an idea about how masses are distributed at different distances from the axis of rotation in a rotating body.
Application of Moment of Inertia
Moment of Inertia has various applications some of which are discussed below:
- Moment of inertia is used in mechanical systems such as flywheels, which store rotational energy and smooth out torque fluctuations in engines.
- It is essential in rotating machinery and gear systems, helping determine the torque needed to accelerate or decelerate components.
- In automotive engineering, moment of inertia affects vehicle stability and handling. Sports cars are often designed with lower inertia for better control.
- Brake systems and bicycle wheels are designed considering inertia; wheels with higher moment of inertia keep spinning longer after force is removed.
- In aerospace, moment of inertia is crucial for satellite and spacecraft orientation using reaction wheels and gyroscopes.
- It is also important in aircraft design, where control surfaces must account for moment of inertia to ensure stable and responsive movement.
- In civil and structural engineering, the second moment of area (a form of moment of inertia) is used to predict bending and deflection in beams, bridges, and frames.
- Structures are designed to ensure they bear loads safely without deforming, based on calculations involving moment of inertia.
- In everyday devices like ceiling fans, inertia determines the torque required by the motor to rotate the blades.
- Washing machines rely on the drum's moment of inertia to balance performance and energy use during rotation.
- Playground equipment such as merry-go-rounds demonstrate how inertia affects spinning and stopping behavior.
- In science education, moment of inertia is studied through experiments with pendulums, rolling objects, and systems showing conservation of energy and angular momentum.
Solved Examples on Moments of Inertia
Example 1: A body of mass 500 g is rotating about an axis. the distance of the center of mass of the body from the axis of rotation is 1.2 m. find the moment of inertia of the body about the axis of rotation.
Solution:
Given that M = 500 g = 0.5 kg, r = 1.2 m.
Obviously, the entire mass of a body can be assumed to be placed at its center of mass. Then the moment of inertia of the body about the axis of rotation.
I = Mr2
I = 0.5 × (1.2)2
I = 0.72 kg.m2
Example 2: The radius of revolution about an axis 12 cm away from the center of mass of a body of mass 1.2 kg is 13 cm. Calculate the radius of revolution and moment of inertia about an axis passing through the center of mass.
Solution:
Given that, M = 1.2 kg, K = 13 cm=0.13 m, l = 12 cm=0.12; KCM = ?, ICM = ?
From Theorem of Parallel Axis I = ICM + Ml2
K2 = KCM2 + l2
or KCM2 = K2 - l2
KCM2 = (0.13)2 - (0.12)2 = 0.0169-0.0144
KCM = √0.0025= 0.05m= 5m
Now, Moment of Inertia ICM = MKCM2
ICM = 1.2 × (0.05)2 = 1.2 × 0.0025 = 0.003 kg.m2
Example 3: A body of mass 0.1 kg is rotating about an axis. if the distance of the center of mass of the body from the axis of rotation is 0.5 m, then find the moment of inertia of the body.
Solution:
Given that, M = 0.1 kg and r = 0.5 m
so I = Mr2
I = 0.1 × (0.5)2
I = 0.025 kg .m2
Example 4: The moment of inertia of the rings about an axis passing through its center perpendicular to the plane of the circular ring is 200 gm cm2. What will be the moment of inertia about its diameter?
Solution:
Moment of Inertia of a circular ring about an axis passing through another center perpendicular to its plane
MR2 = 200 gm cm2
Moment of inertia about to diameter
= 1/2 MR2
= 1/2 × 200 = 100 g.cm2
You may also Read,